


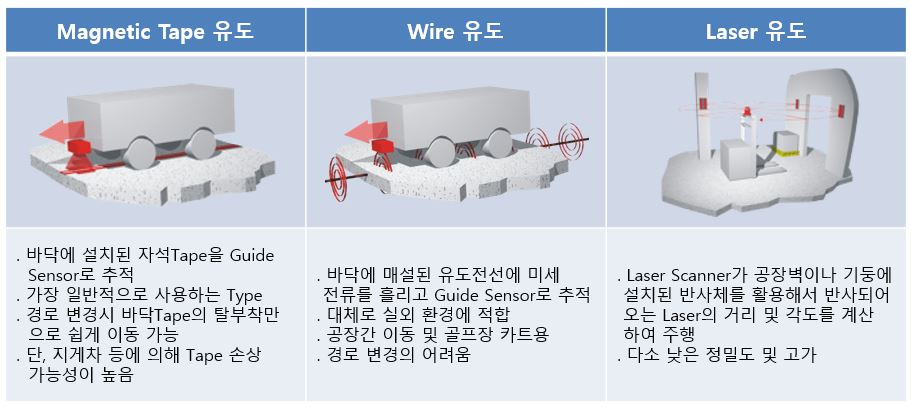
AGV의 유도방식은 현재 Maker별로 다양한 형태로 개발이 진행되고 있는데, Magnet / Wire / Laser / 카메라 등
을 개별적으로 적용하거나 여러 개의 Sensor를 적용해서 각 공장의 Map과 연계하는 형태가 대표적이다.
하지만, 최근에는 설치 및 운영상의 편의를 위해 無Guide Type의 SLAM AGV로의 기술개발이 꾸준히 진행되어
일부 현장에 적용이 되고 있으나 대부분 외국업체 제품으로 고가 및 A/S의 문제가 지속되고 있다.
현재 가우리기술에서 개발된 SLAM AGV는 이러한 부분을 상당히 해소할 수 있는 대안이 될 수 있다.
SLAM은 Simultaneous Localization And Mapping의 약자로 실시간 자기위치 인식을 가능케하는 최신기술이다.
SLAM을 구현하기 위한 다양한 방법이 있는데, Laser / 카메라 / GPS / Wifi 기술을 활용해서 자기위치를 실시간
으로 파악하려는 시도가 가장 널리 이용되고 있으며, AGV에는 주로 Laser를 이용하여 현위치를 파악하는 기술이
주류를 이루고 있다. 이렇게 SLAM AGV를 구현하면 기존의 Magnetic / Wire / Laser 반사형 AGV의 여러가지
단점(바닥 및 벽체공사 등)들을 해결 할 수 있어 향후 AGV의 주류로 자리잡을 기술이다.
아래는 일반적인 SLAM AGV의 작동방식을 표현한 것이다.

